KAUST KGSP Scholars Research Robotics at CMU
The Carnegie Mellon Robotics Institute community congratulates the KAUST Gifted Student Program (KGSP) scholars for their successful completion of the RI Summer Scholars program. Early research experiences prepare emerging scholars for active engagement in scientific research, discovery, and innovation.
CMU RISS & KGSP scholar research projects have included:
- Incorporating Eye Gaze Into Shared Autonomy for Assistive Robots
- Design & Modeling of a Custom Tilted Multirotor Aerial Manipulator for Bridge Inspection
CMU RISS co-director, Rachel Burcin, stated, “The KGSP enrichment programs help to prepare scholars for active engagement and collaboration in research during their undergraduate programs. RISS KGSP scholars have worked alongside thought leaders in robotics as partners and contributors. Nawaf and Nadia’s research results reflect the excellent preparation of the KGSP enrichment programs and the summer research experience at CMU has further nurtured their creativity, problem-solving skills, and passion for the field. KGSP scholars are uniquely positioned to make significant contributions in STEM that will impact our quality of life, mobility, health, and safety.
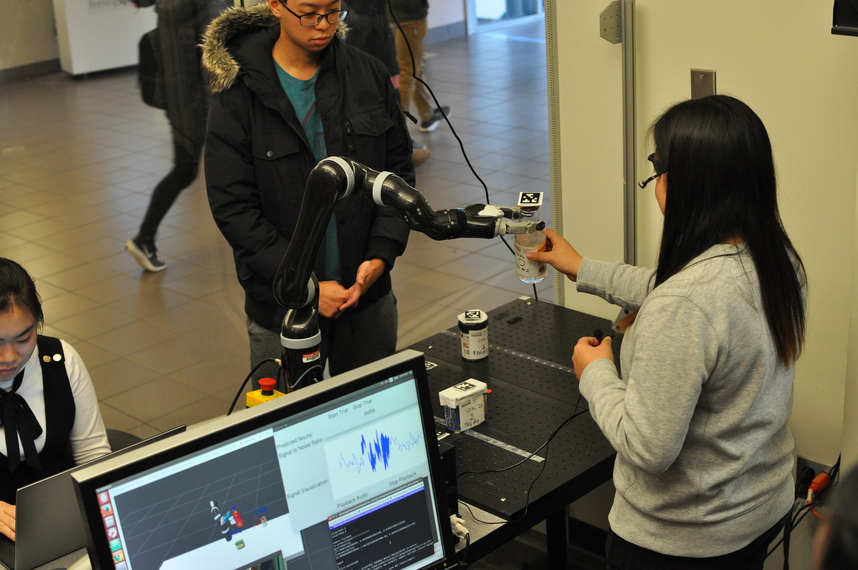
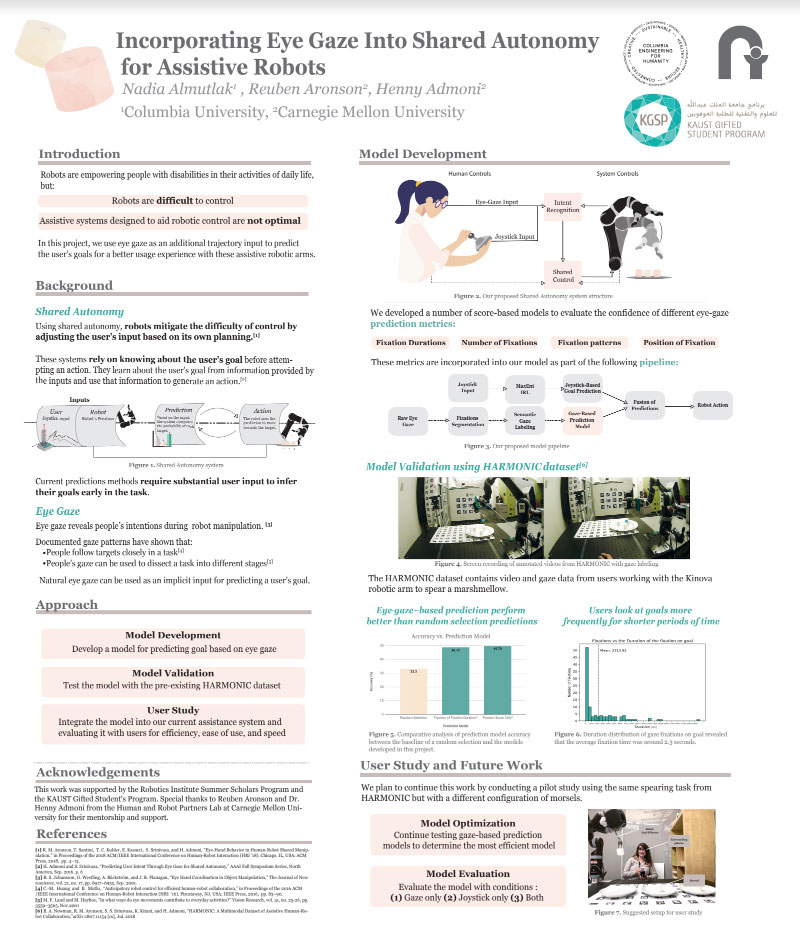
Incorporating Eye Gaze Into Shared Autonomy for Assistive Robots

Nadia Almutlak, a 2019 CMU RISS & KGSP Scholar, worked under the mentorship of Dr. Henny Admoni, Mr. Reuben Aronson, and the HARP lab exploring how robots are empowering people with disabilities in their activities of daily life. Her research used shared autonomy whereby the robots could mitigate the difficulty of control by adjusting the user’s input based on its own planning. The team explained that the project used eye gaze as an additional trajectory input to predict the user’s goals for a better usage experience with these assistive robotic arms.
Dr. Henny Admoni and the Human And Robot Partners (HARP) lab specialize in fully autonomous robotics applications that can recognize human intent and take an active role in assisting the human.
More about the RISS mentor Dr. Henny Admoni & the HARP Lab:
http://harp.ri.cmu.edu/
https://www.ri.cmu.edu/robotics-groups/human-and-robot-partners-lab/
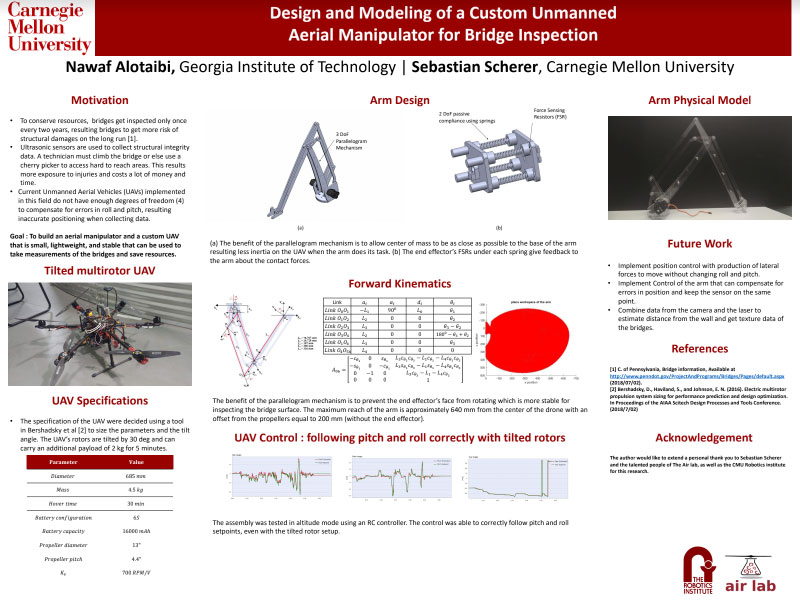
Design & Modeling of a Custom Tilted Multirotor Aerial Manipulator for Bridge Inspection

Nawaf Alotaibi, a 2018 CMU RISS & KGSP Scholar, was working under the mentorship of Dr. Sebastian Scherer and the Air Lab towards building an autonomous custom unmanned aerial system (UAS) with a robotic arm for bridge inspection using ultrasonic sensors for the picking of moving and stationary objects and firefighting. The drone built was a custom 6 DoF hexarotor for lateral movement without tilting with a novel 3 DoF robotic arm design inspired by ABB IRB460 robotic arm.

More about RISS mentor Dr. Sebastian Scherer and the AIR Lab:
https://www.ri.cmu.edu/ri-faculty/sebastian-scherer/
http://theairlab.org/research/