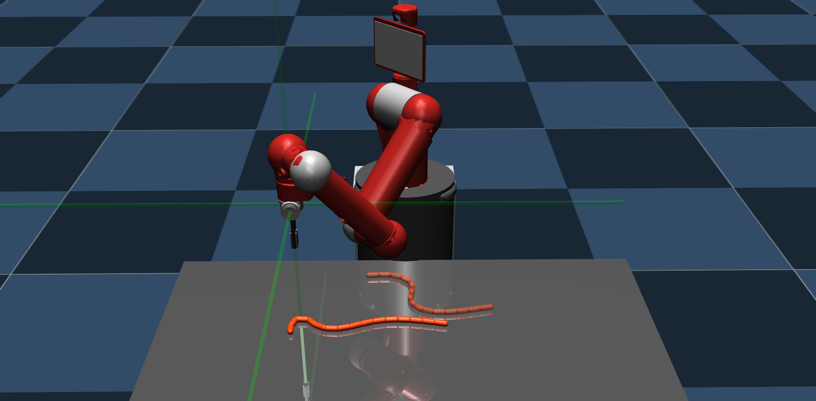

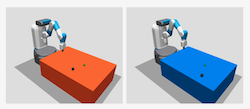
Exploring approaches to object object manipulation
How can robotic arms be made more robust? Autonomous robotic manipulation requires many individual complex tasks to come together. A robot must be able to accurately identify the object it needs to move, plan how to move the object to its destination, and execute the plan accurately. Deep learning has [...]


The Foundations of Autonomous Vehicles
How has Carnegie Mellon University shaped the autonomous vehicle landscape? Carnegie Mellon University has been a leader in autonomous vehicles for as long as they have been navigating the roads. From developing the first autonomous vehicle with all onboard computing to winning DARPA Grand Challenges, CMU can be credited [...]



UAVs: Making the workplace safer by taking on the most dangerous jobs
How can UAVs change the way dangerous jobs are perceived? Dr. Sebastian Scherer and his team in the AIR Lab have found numerous applications for UAVs to create a safer environment for workers. Applications such as bridge inspection, search and rescue, and navigation in dangerous are just a few that [...]
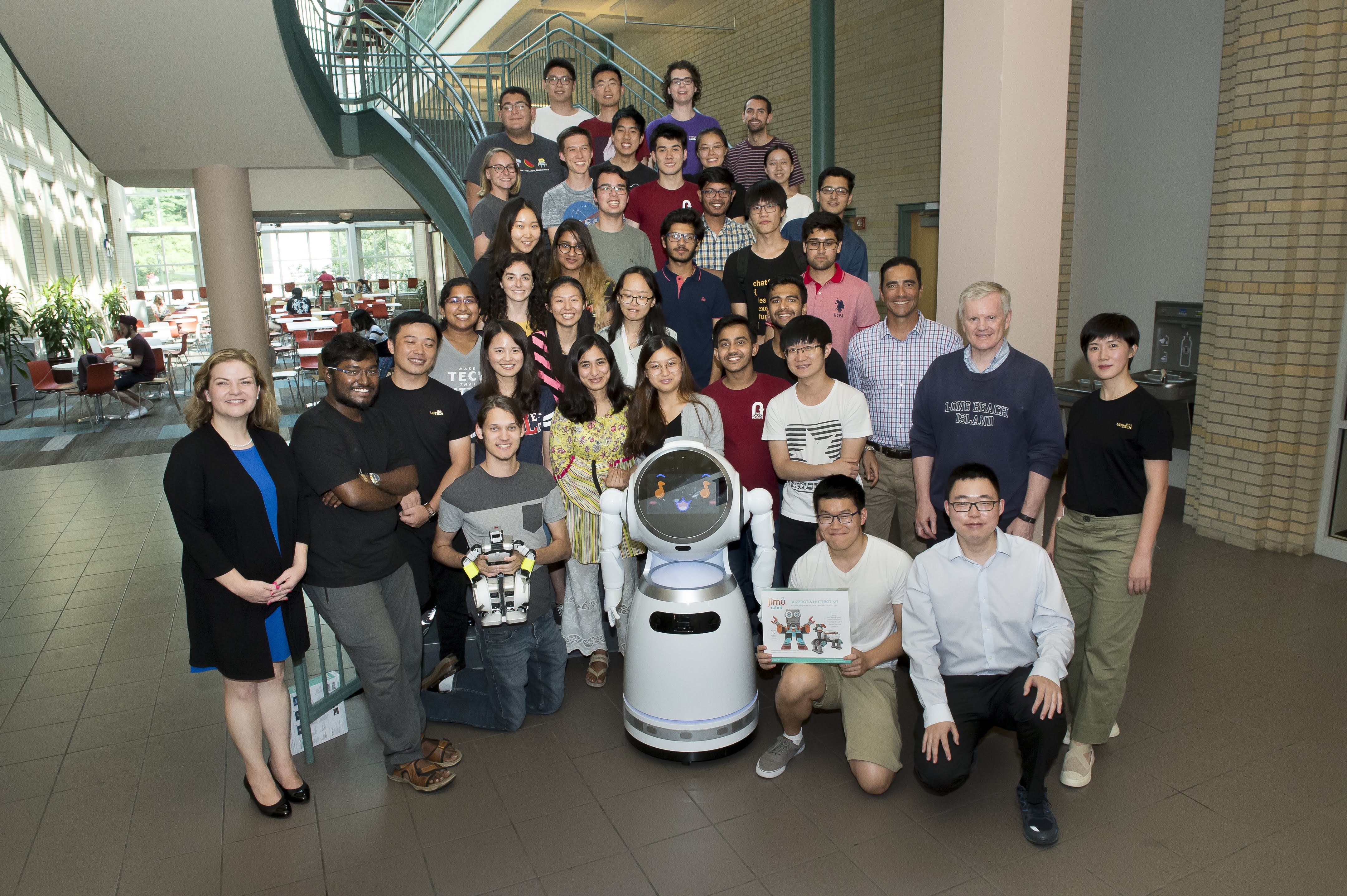
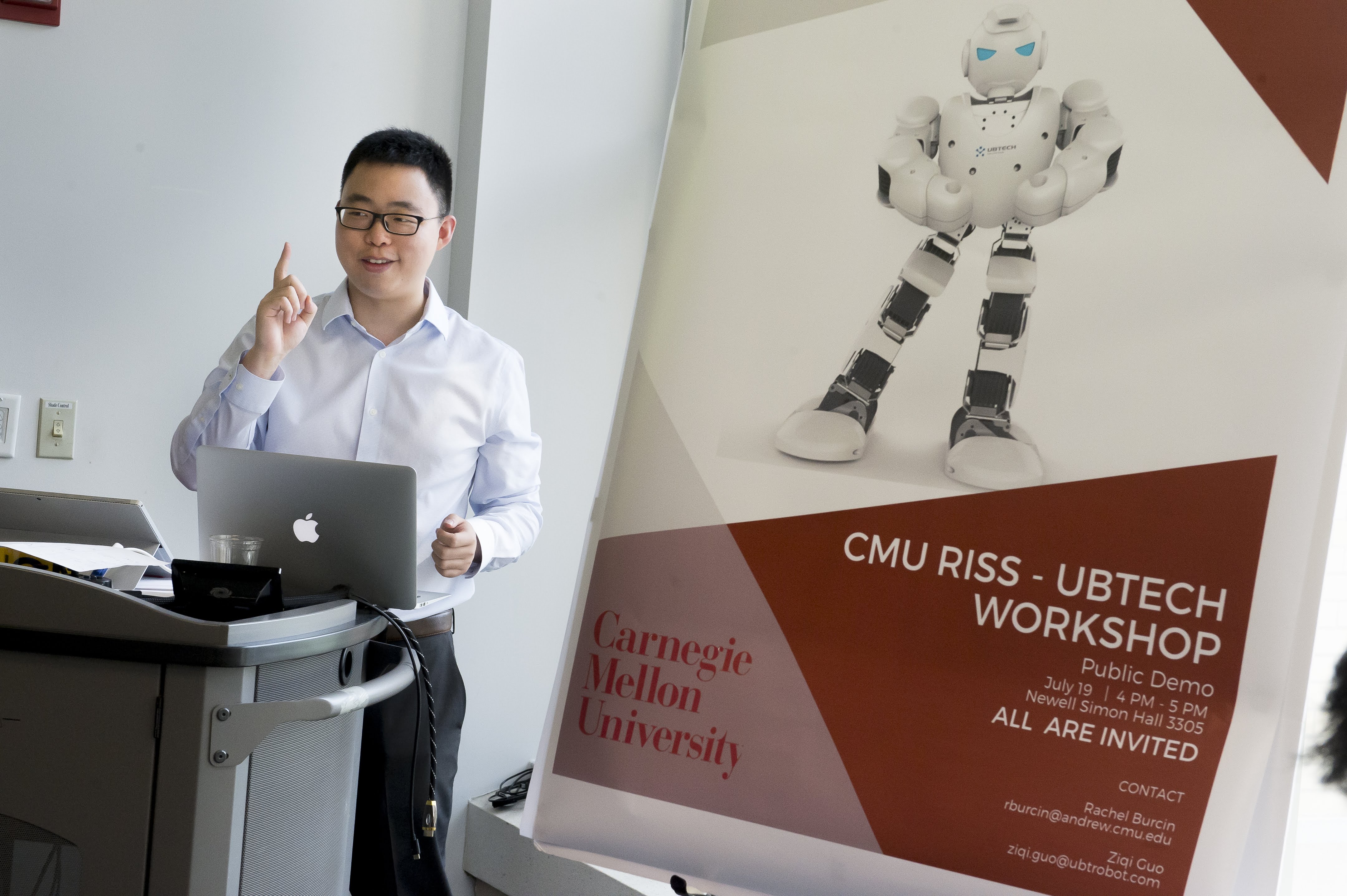

Hands-on Experience with Helpful Humanoids
How can humanoid and AI robotics help in everyday households? UBTECH’s goal is to answer that. Carnegie Mellon University and UBTECH Robotics hosted their third annual humanoid workshop with the RI Summer Scholars. UBTECH Robotics is a leader in producing service robots. They have made great strides in achieving their mission with innovations such [...]



Bringing UAVs to the Classroom: Gaining early experience with DJI Workshop
How can undergraduate students gain experience working with UAVs? Carnegie Mellon University and DJI hosted their third annual unmanned aerial vehicle (UAV) workshop for the RI Summer Scholars. Since 2006, DJI has grown into the world’s leading producer of consumer and professional unmanned aerial vehicles, or drones. As a company, [...]

Motion Tracking without Inhibitive Markers
Motion Tracking without Inhibitive Markers How can human motion tracking be made more accurate and robust? The Panoptic Studio Lab creates a way to accurately track human motion using only cameras. This approach accurately tracks motion when multiple overlapping bodies are present and allows for free movement that past technologies, [...]